NaviSuite
Ct-U/S Navigator for Interventions
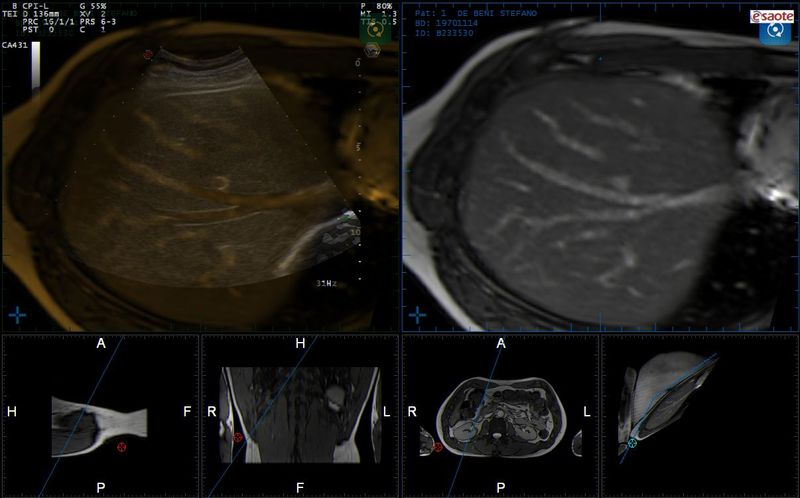
The Virtual Navigator Technology combines two different imaging modalities: real-time ultrasound scanning and static imaging (e.g. MR/CT) driving you inside the human body to reach the desired target.
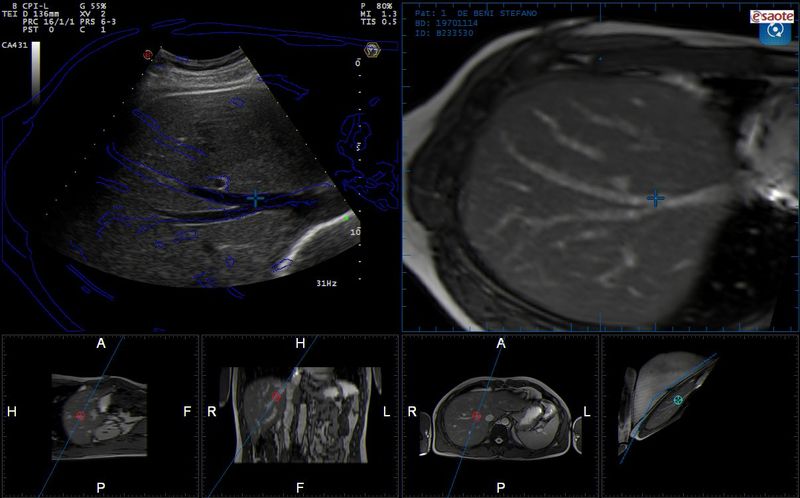
Thanks to the Fusion Imaging and the Tracking System you will have a perfect correlation of Ultrasound and MR/CT images significantly increasing precision and accuracy of image-guided diagnosis and interventional procedures.
NaviSuite is the right, easy and fast solution to improve your practical work-flow by identifying the internal liver lesions and performing the follow-up in interventional imaging.
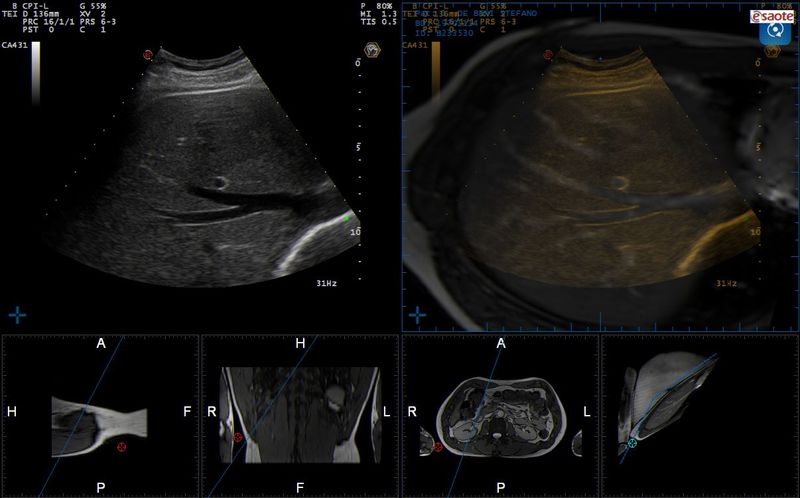
NaviSuite, moreover, allows you to merge MR/CT images with contrast-enhanced ultrasound real-time scanning, increasing your confidence through the use of the different modalities.
Virtual navigation for Diagnosis & Interventions
Biopsy guidance (including TRUS and Stepper support)
Catheter placement
Instrument navigation
Breast navigation module using deformation model
2D navigation (x-ray, mammography)
Bodymap navigation
Perfect correlation of ultrasound with CT/MR/PET images
Multi modality support
Automatic image fusion
Online, real-time display
Intuitive & Easy-To-Use
Virtual Navigator History
2002 The Idea |
|
2004 Introduction | - RSNA2004 CD Presentation |
2005 Virtual Needle | - RSNA 2005 |
2006 The Planning | - CIRSE 2006: Gruntzig Lecture (Solbiati-Cova-Ierace-De Beni) |
2007 MyLab70XVG New | - RSNA 2007 |
2012 Motion sensor | European Patent 01ESA12-EP |
2013 Further innovations | - Automatic registration (Patent Pending) |
2014 Specific requirements | - 2D Navigation |
2015 | - Automatic registration in Transcanial applications |
2016 | - Dedicated workflow navigation protocols for Abdominal, Urology, Neurosonology, and Neurosurgery procedures |
2017 MyLab LION | - Urology and TRUS protocols and the possibility to mount US probe on the stepper - User interface and architecture adjustment for full integration on new ESAOTE LION device |
2018 | - Breast navigation module – US<->US only including breast scanning coverage, targets definition, 3D US review after scanning, pre-post examination comparison |
2019 | - Breast Navigation extended to US<->MR and US<-> Mammography using deformation model do adjust the dataset to the current shape of the examined breast. On the fly adjustments are applied during the scanning of further deform |
2020 | - Urology: automated prostate zones definition, extended URO reporting including insertions zones and coverage indications |
2021 | - Urology: automated model-based prostate contouring mode (patented) - Breast Navigation: more accurate breast deformation algorithm |
2022 | - Augmented reality view including overlapping of the probe, probe plane, needle, targets and, insertions over real patient video |
2023 | - Fully automatic abdominal registration using 3D camera (patent pending) |