RoboNav
A fast and precise tool for bringing your needle to the target. The RoboNav software combined with the iSYS 1 hardware is an accurate system for interventional radiology. A wide variety of applications are supported, including, but not limited to, biopsy procedures, tumor ablation, nerve blocking, electrode placement etc...

The Software guides the user through an easy to understand workflow, which resembles the usual medical routine of a needle placement in interventional radiology.
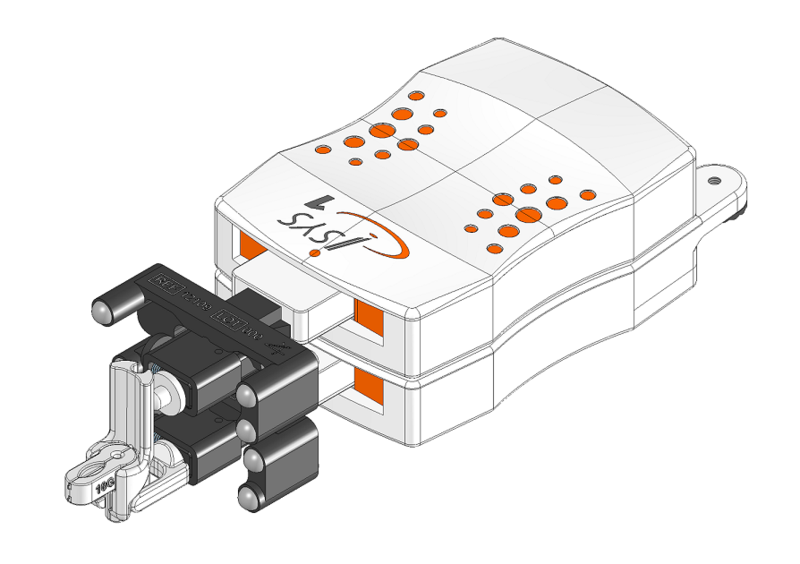
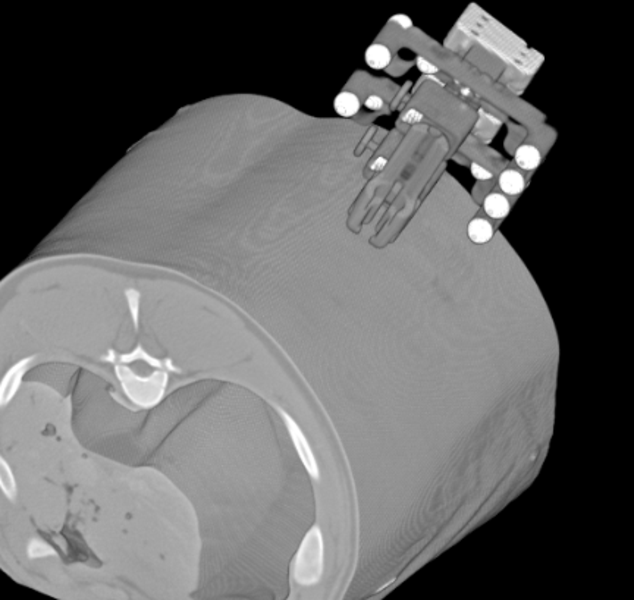
Place the "iSYS 1 Robot Positioning Unit" above the target region
Acquire a CT-scan
Easy planning of a 3D needle path with double angulation
Multiple needle paths can be planned at once
Automatic registration of the "Robotic Positioning Unit"
Just one click for automatic fine positioning of the Robot's needle guide tool
Place a needle in the tool and it will follow the planned path to the target
The result can be displayed immediately on scans for verification
Successively all planned paths can be positioned by the RPU
Alternatively needle paths can be imported from a brachy DICOM RTPLAN
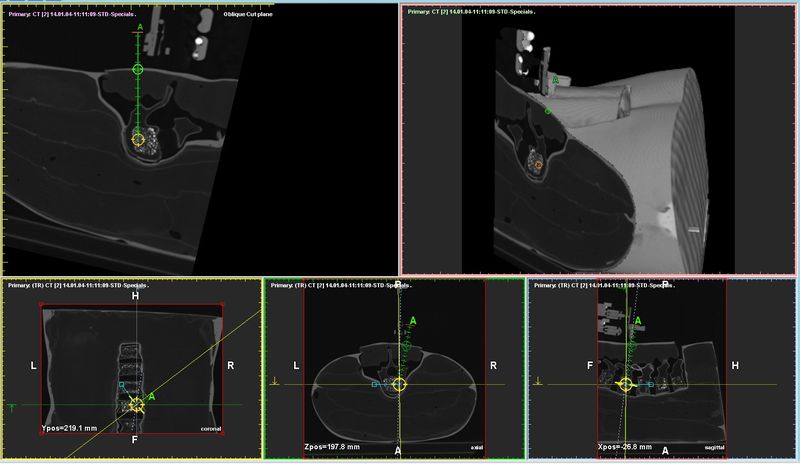
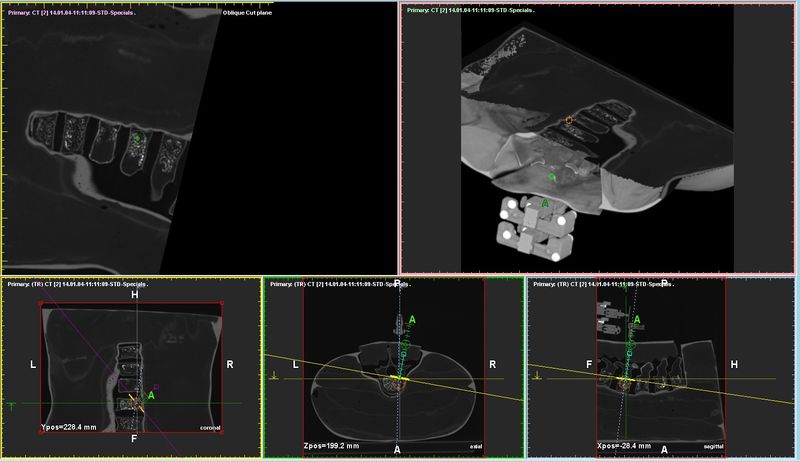
A trajectory for the intervention is done quite simply.
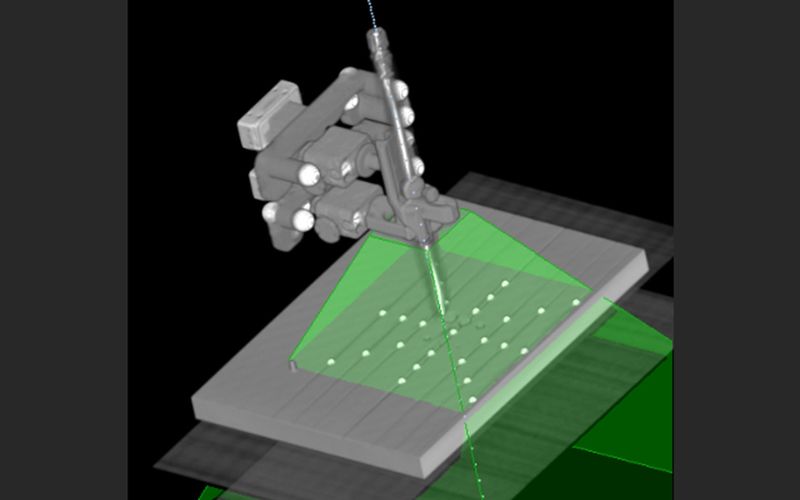
The area that can be reached by the "Robotic Positioning Unit" (RPU) is marked in the slice images and can also be rendered in the 3D visualization of the volume.
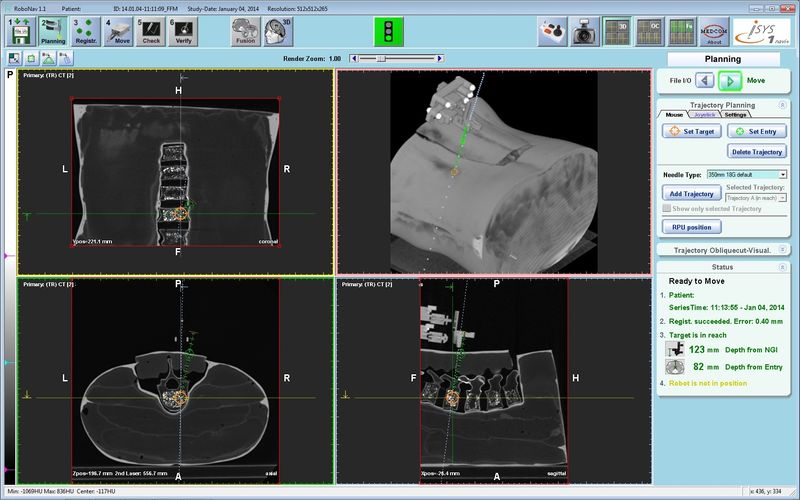
2D/3D path visualization
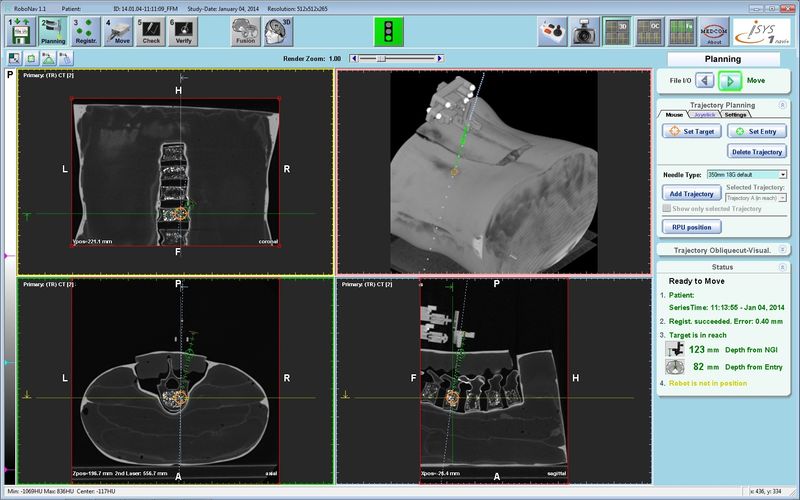
Within that reachable area the trajectory is defined by a target and an entry point that can be set on any of the orthogonal slice cuts.
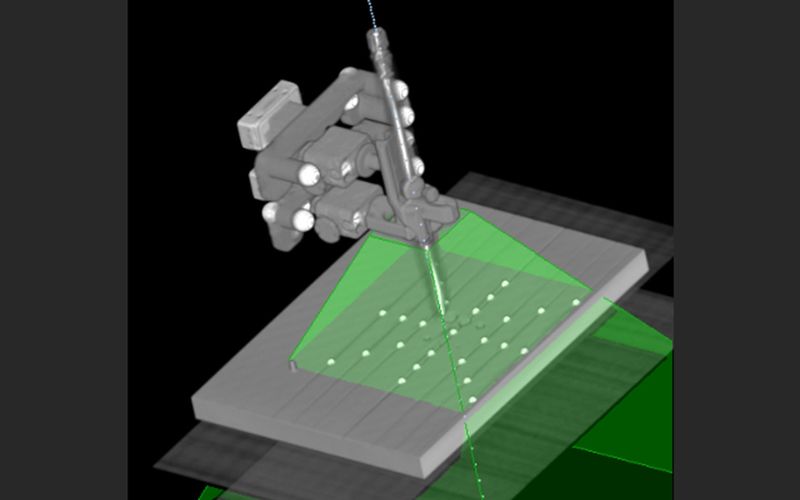
Reachable area are marked
Visualization
A 3D reconstruction of the CT slices helps the user to figure the location of the robot in relation to the patient.
There are the common ortogonal slice views (axial, coronal, sagittal) that show a projection of the trajectory onto that slice. The oblique cut offers two presets: needle eye view (perpendicular) and a cut plane in line with the needle.
Different visualization options for a planned path, giving a good impression of neighboring tissue and anatomy.
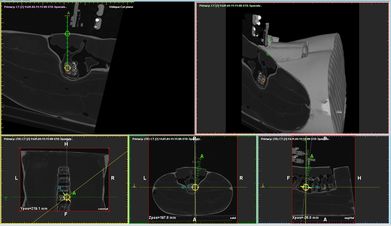
Oblique cut needle direction 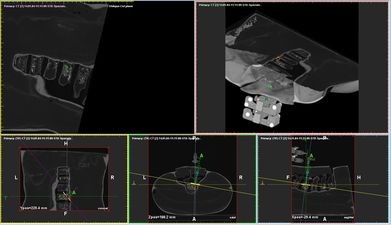
Oblique cut needle eye view
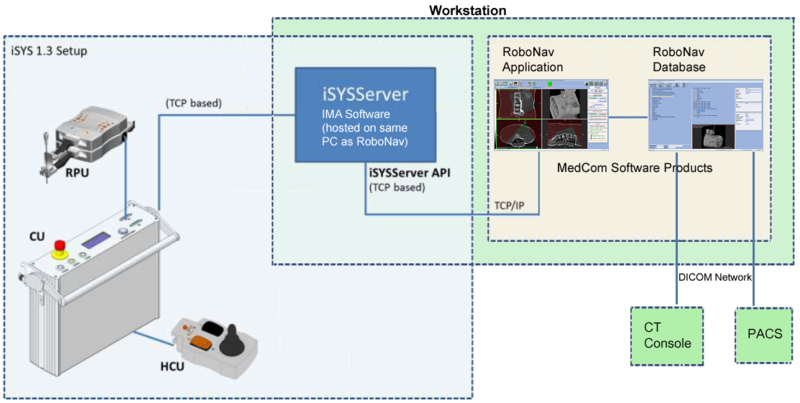
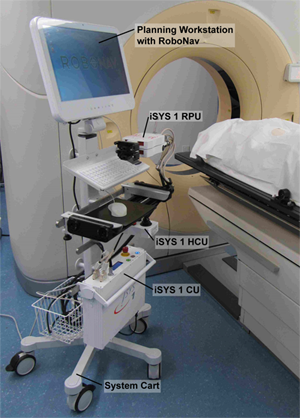
System Overview
The iSYS 1 Navi+ system consists of the iSYS 1 hardware parts, namely the Robotic Positioning Unit (RPU), Control Unit (CU) and Handheld Control Unit (HCU) and the RoboNav planning software with its database. DICOM data for planning can be received via DICOM network directly from the CT console or from a PACS. The RoboNav software is accessible on a workstation that is mounted with the iSYS hardware to a mobile cart for flexible handling. The cart can be moved next to the CT-table and the RPU can be taken from the cart and mounted to the table for fixation above the patient.